In the North Atlantic on the evening of January 20, 1967, four U.S. Navy destroyers steamed east in a line abreast at 20 knots, heading for the Strait of Gibraltar. It was a Friday and we had departed the big naval base in Norfolk, Virginia nearly two weeks earlier to participate in a large naval exercise. We were now headed off on a multi-month Mediterranean cruise. It was the height of the Cold War and tensions between the Soviet Union and the United States were extremely high. We were not going there to sightsee.
My ship, the USS Steinaker (DD-863) was a Gearing class destroyer, and like the others, it had been built during the closing months of World War II. It was 390 feet long and was powered by two steam turbines producing 60,000 shaft horsepower and driving two 14-foot propellers. Our main purpose was anti-submarine warfare, or ASW. Our top speed was 36.8 knots—destroyers are known as “Greyhounds” for a reason.
A few years prior to my arrival aboard Steinaker, the decades-old ship had undergone a major fleet rehabilitation and modernization program, or FRAM, where new weapon systems and a new AN/SQS-23 sonar system had been installed.

As we headed east, our sonars were all in active mode, all with a peak output power of 50,000 watts. Each sonar was tuned to a slightly different frequency to reduce mutual interference. The entire northeastern Atlantic was probably ringing with bottom bounce echoes and reverberations, and any hostile submarines, along with every whale, porpoise, and sea turtle within 20 miles was probably trying its best to get away from us as we approached.
Our sonars were so powerful that at night they sometimes caused plankton to phosphoresce as a pulse swept over them, producing expanding green concentric circles of light radiating outward at the speed of sound from our enormous bow-mounted 30-foot sonar domes.
The AN/SQS-23 sonar system had a maximum display setting of 40,000 yards, or 20 nautical miles. That would suggest that it could transmit enough acoustic energy to bounce off a submarine 20 miles away and the echo from its hull would return enough energy to allow detection. In practice our emissions could be detected by an adversary long before any echoes would be strong enough to be detected back aboard our ship. Normally, the sub would simply move far enough from our path to remain undetected, keeping it safe from attack, but also rendering it ineffective and irrelevant to us.

My involvement with the Steinaker began on a miserably cold and rainy October evening when I arrived at the destroyer and submarine piers at Naval Station Virginia, the largest navy base in the world. I showed up straight out of boot camp, and I was about to become the lowest-ranking sailor on the ship—a newly minted Seaman Apprentice. I was what was called an “immediate active duty” reservist.
Man, it does not get much worse than that!
Getting my feet wet
As a civilian, I had been working as an electronics technician for a small company that manufactured pressure transducers for the NASA space program and for a classified U.S. Air Force program, but since I had no Navy training I started my new life on the deck force. These guys are called Boatswain Mates. In port we maintained the exterior of the ship, mostly chipping paint, and repainting. We were also responsible for loading equipment and stores aboard the ship. Underway we stood watch as lookouts and served on the bridge as Helmsmen. We were also responsible for underway refueling and replenishments. In the old days Boatswain Mates handled the sails and rigging.
There was a lot to learn and being the Helmsman underway was challenging. Handling a ship with 60,000 horsepower in heavy weather and staying on course required focus, and as I learned I began to enjoy it.
Since I did arrive with some useful technical skills, I was eventually assigned to work with the sailors that operated and maintained the ASROC (Anti-Submarine Rocket), which was added during the FRAM upgrade. It was an all-weather, gyro-stabilized, all sea condition, standoff ASW weapon system with a six-mile range. We also had torpedo tubes on the main deck, but the ASROC was our primary ASW weapon system.

I took the picture above during an exercise against one of our submarines. The ASROC launcher contained eight sealed launch tubes which could each contain either a Mk 46 acoustic homing torpedo, armed with a 99-pound PBXN high-explosive warhead, or a 10-kiloton W44 nuclear depth charge, both of which would be transported to the target area by RUR-5 rocket. With our sonar we should have been able to keep an enemy submarine far enough away to avoid a torpedo attack while allowing us to silently drop one of these torpedoes on him by parachute.
The Mk 46 torpedo had a cylindrical-shaped no-escape zone several thousand yards in diameter and 1,500 feet deep. With a top speed of 45 knots, it would have been deadly against a diesel-electric sub anywhere inside that zone. The sub would probably not hear the small splash as the torpedo descended to the water, detached from its parachute, and then sank silently to its pre-programmed top search depth. Their first indication of trouble might have been when the torpedo went active and began hunting them. Of course, if we opted for the nuclear depth charge it would not matter if the sub heard the splash or not.
After a few months working on the ASROC system, I was again transferred, this time to the Operations Division where I began learning to become a Radarman.
The BFP
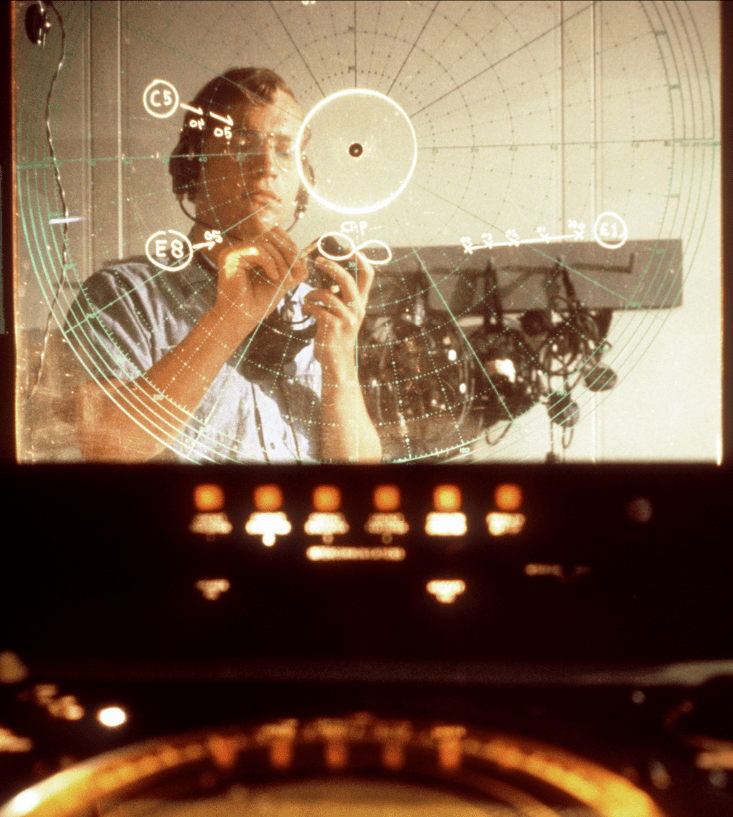
On the evening of January 20, 1967, and after about six months of on-the-job experience, I was on watch in the Combat Information Center, referred to as CIC or simply “Combat.” I was manning the surface search radar repeater. In that position, it was my responsibility to track every surface contact within 20 miles and determine its course and speed as well as its closest point of approach, or CPA. If neither vessel changed its course or speed, how close would that other ship get to our ship, and when and where would this occur? Our goal was to never let another ship get within 2,000 yards, or one nautical mile. If the CPA was determined to be less than that minimum, we would calculate an alteration to either our course or speed to increase the CPA to that minimum and pass it to the bridge. Enlisted men cannot tell an officer what to do, but the officer of the deck always accepted our recommendation without question.
Of course, altering either course or speed to deal with one ship would alter the CPA of all the other ships in the area. It could get extremely complicated, and we did all the calculations using a grease pencil on our radar scopes or with pencil and graph paper. There were no iPads or digital computers in those days.
Approaching the entrance to the Mediterranean Sea from the Atlantic was a busy time for us, with the four destroyers and many civilian merchant ships all converging on or departing from the same narrow Strait of Gibraltar. Using a sound-powered headset, I would have been talking to the lookouts as well as the bridge talker, whose job it was to repeat everything I told him to the Officer of the Deck on the bridge and write it on a plexiglass status board. I might also have been working with the electronic countermeasures (ECM) operator. We memorized the characteristics of all major Soviet radars—both sea and land-based. He would have been especially alert for detecting the Soviet SS-2 submarine surface search radar.
Lastly, I would have also been keeping an eye out for “sinkers.” A sinker was any radar contact that appeared for one or two sweeps and then disappeared. That could indicate that a submarine had briefly exposed its periscope or ECM antenna for a quick look around.
Working that position could be extremely intense and sometimes things were happening so fast that you were literally the only person on the ship that really knew the big picture completely—we called it the BFP [Big Fucking Picture]. Occasionally you had so much information in your head that you simply could not keep up and your mind would just go blank. You had become task saturated, and you had lost the BFP. It was a horrifying feeling, looking down at all those little contacts and grease pencil lines that you had made and realizing that you no longer knew which were which.
Underway, Radarmen worked almost continuously. We usually lived on three or four hours of sleep a day, sometimes for weeks at a time. Our sleep was broken into two short naps between watches in the CIC, and, in this case, we had just come off two weeks’ involvement in that big naval exercise.
It was brutal.
If I was not on watch or involved in an underway replenishment, a refueling, or dragooned into some other essential task like polishing brass, I would have been desperately trying to get some sleep. Sometimes, after coming off watch, I was so spun up that I just lay in my rack trying to calm down and sleep, and then it was time to go back on watch again. It is a miserable feeling being both mentally and physically exhausted, knowing that you only have a few hours to recuperate, but being unable to sleep.
Other positions in the CIC were a lot less stressful and we rotated off that position after one hour. When things were hectic that was about all anyone could deal with. Other times there might only be one other contact within 20 miles and that would usually be a Soviet electronic intelligence (ELINT) trawler. We were almost always shadowed by at least one.
It was a cat and mouse game on both sides. All a Soviet submarine had to do was to check for the US Navy’s AN/SPS-10 surface search radar. Every Navy ship used it continuously. The sub would have been able to detect any US Navy ship within 20 miles in seconds—one reason that we had never detected a Soviet submarine before.
The encounter
It was just another day at sea, until around 8:00 PM local time, and probably about 50 miles from the entrance to the Strait of Gibraltar, when Sonar announced that they had a contact—a possible submarine.
We immediately went to condition 1-AS. 1-AS is a modified General Quarters condition where anyone associated with anti-submarine warfare activities would immediately head to their duty stations to replace or supplement the existing watchstanders. All the Sonarmen and Radarmen would head for the CIC. The Helmsmen and other bridge personnel would be replaced with the most experienced crew members. While the ASW Attack Team was effectively at general quarters and ready for war, the rest of the crew might be down on the mess deck watching a movie.
We needed to quickly declutter the area. As the ranking officer, our captain had command of our destroyer group. He sent two of the four destroyers towards their destination in Italy. That left my ship, tactical call sign “Tom Boy,” and the USS Wallace L. Lind (DD-703), tactical call sign “Tidal Wave.”
I always resented Lind. They had a great tactical call sign, but ours was lame. Why couldn’t we be “Claw Hammer,” or “Wrecking Ball?” I’m sorry, but I’ve been carrying this resentment for over 50 years and I had to get it off my chest!

Anyway, we may have had the Lind temporarily shut down its active sonar and clear the immediate area while we attempted to classify the contact.
Back in 1967 there was no precision navigation, which made this a tricky process. The contact seemed to be moving slowly away from the coast at two knots. But it was possible that we were in a two-knot current and had detected an uncharted pinnacle—an isolated pillar-like elevation rising off the seafloor. Were we in a two-knot current or not? There was no easy way to answer that question in that age and the answer was critically important.
I did not know this, but we had a sonar mode that could determine the outline of the object we were tracking by passing directly over it and doing a raster scan. It was called “Aspect Mode.” This was done, and the object it traced out had the distinct shape of a submarine with diving planes.
OK… We are tracking a submarine, but who does it belong to? By now, this contact was generating a lot of interest up the chain of command and in short order we were informed that there were no US or NATO submarines in our area.
Meanwhile, Sonar had been attempting to contact the sub using an underwater acoustic communication system called “Gertrude.” Gertrude, which I had never heard of until then, was a system that had been in use on most U.S. Navy ships for many years. Presumably, all U.S., and most NATO submarines used this system too.
Anyway, this is when I found out that one of my shipmates had a hidden talent. He spoke Russian, but there was no response from the sub in Russian or in English. Not good! The contact was now classified as hostile, and we set about treating it as such. It was still maintaining its course and heading out into the Atlantic at a steady two knots.
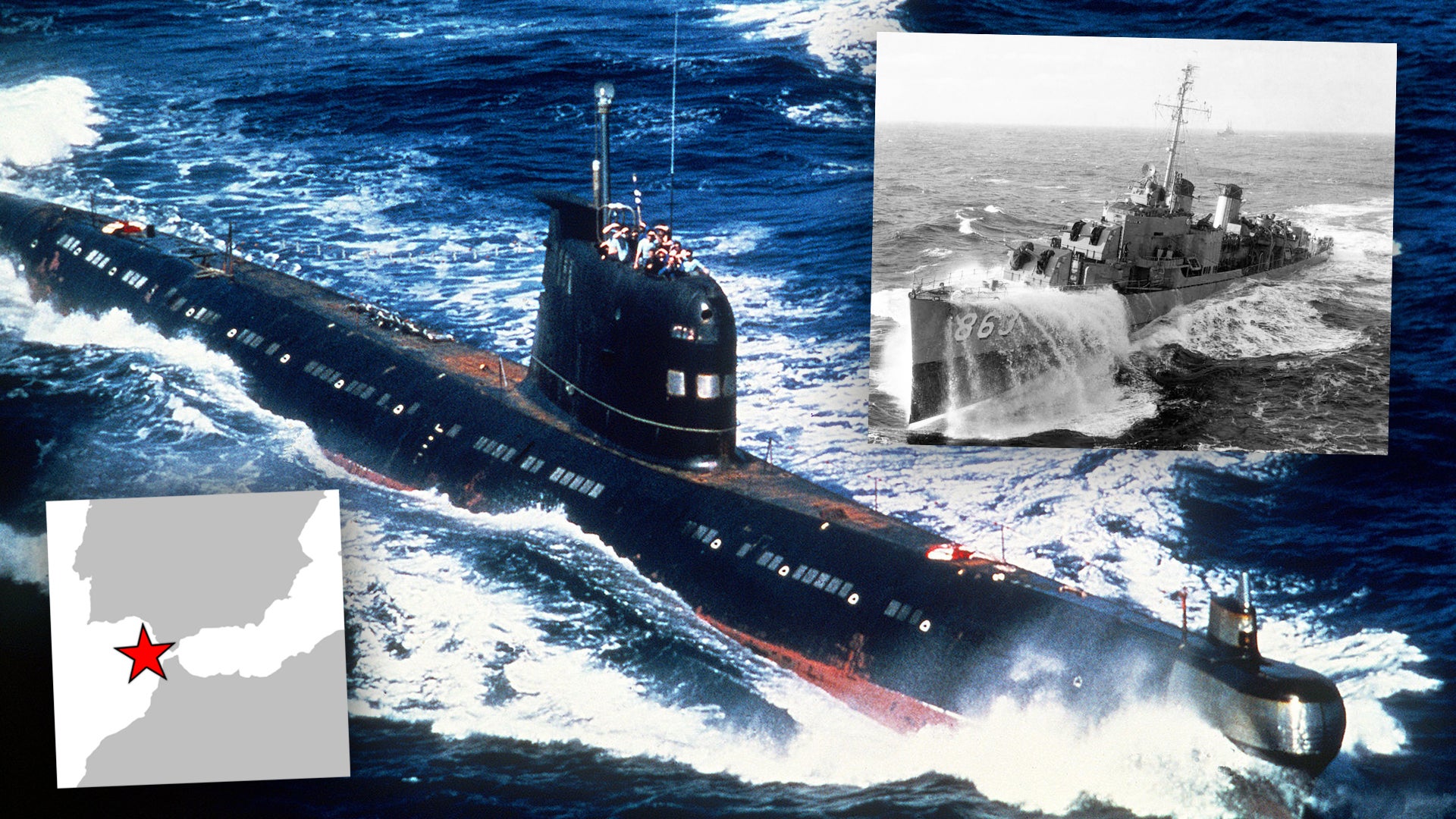
A lot of radio traffic was passing back and forth from headquarters and within a few hours we knew that this sub was a Russian Foxtrot (its NATO designation). It was a diesel-electric submarine that the Navy had been tracking for some time in the Med. It had managed to slip away and make a submerged transit of the Strait undetected, only to get caught in our sonar web.
The Foxtrot had three shafts and three propellers. Its maximum depth was just over 900 feet, and it could stay submerged for at least four days without snorkeling. Submerged, its three main electric motors could produce 5,400 horsepower and drive it through the water at 15 knots, but that would drain the batteries quickly. It also had a separate low-power electric motor called a “creep motor” that would minimize drain on the batteries and help keep the sub very quiet, but the maximum speed using the creep motor was just two knots. The creep motor was rated at only 180 horsepower. The sub displaced 2,515 tons. It was amazing that it could make any headway at all on 180 horsepower.
The Strait of Gibraltar is 36 miles long and seven miles wide at its narrowest. Over 200,000 ships pass through it each year, and many are huge. The water in the Strait consists of a deep layer of salty Mediterranean water flowing west, and a less salty upper layer of Atlantic water flowing east. It sounds simple, like two opposing lanes of traffic on a road, but these two opposing currents produce a chaotic, complex, and ever-changing environment for a submarine.
Before attempting a submerged transit of the Strait, the sub would have established their exact position near the eastern entrance by taking bearings to known objects on opposite shores through their periscope and marking up their chart. Their position would be where all the bearing lines crossed.
Once submerged to clear surface traffic they would have used dead reckoning to navigate—a process of determining current position from the sub’s heading and estimates of distance traveled based on speed, and time. It is not hard to see that as time passed this method of navigating becomes less and less accurate. Worst of all, they would have suffered from the same navigational limitations that we had—it would have been impossible for them to tell if the submarine was in a current.
The sub’s only option would have been to stay deep enough to avoid a collision with a surface vessel and make enough turns to ensure that they were really moving west and were not being pushed backwards by the easterly current. Running at nine or ten knots to insure forward progress against any current, and running on their main motors, they would be draining their batteries quickly, but they had no choice. The captain would have calculated that they would have enough remaining charge to make it out into the Atlantic and clear of shipping where they could surface or snorkel to ventilate the boat and recharge their batteries.

The Foxtrot’s captain was obviously a very skilled submariner. He had already broken contact with the U.S. Navy in the Med and had begun a submerged transit of the Strait. As he was headed east, there was no way he could have known we were headed directly towards him from the Atlantic, but once out of the Strait and into the Atlantic, he should have heard us coming when we were still at least an hour away.
Why didn’t he move to avoid us?
Thermoclines
It is critically important to both destroyers and submarines that they always know the water conditions that they operate in. At regular intervals, we did a “BT drop.” BT stands for bathythermograph—a device that was dropped from the fantail of the ship on a long steel cable. It recorded depth and water temperature as it was lowered. Submarines would measure temperature versus depth continuously during normal operations.
We would both be looking for a layer in the water column where the temperature changed abruptly over a small difference in depth. This is called a thermocline. It can cause active sonar, or any other sounds from the surface, such as a ship’s engines, to bounce off instead of passing through the layer. That acoustic energy would then be trapped between the layer and the sea surface and could travel long distances. A submarine would normally stay above that layer where it could hear danger approaching, and then duck under it to hide. But, if he was hidden under that layer, how did we find him?
At this point in my story, I had exhausted my knowledge of underwater acoustics and I could not answer that question. I needed to do more research. Among the large amount of information available on the Internet, I found an abstract of a research study that was done by the Acoustical Society of America. Here is a quote from the very first sentence:
“Measurements were made at sea of the changes in acoustic intensity in passing from a shadow zone through the limiting ray and into the directly ensonified region.”
One sentence into this abstract and I already had to stop and look up ensonified! Ensonify (Verb): to fill with sound.
That sounded important! but I was also confronted with two more new terms!
Shadow Zones, Limiting Rays, and the directly ensonified region
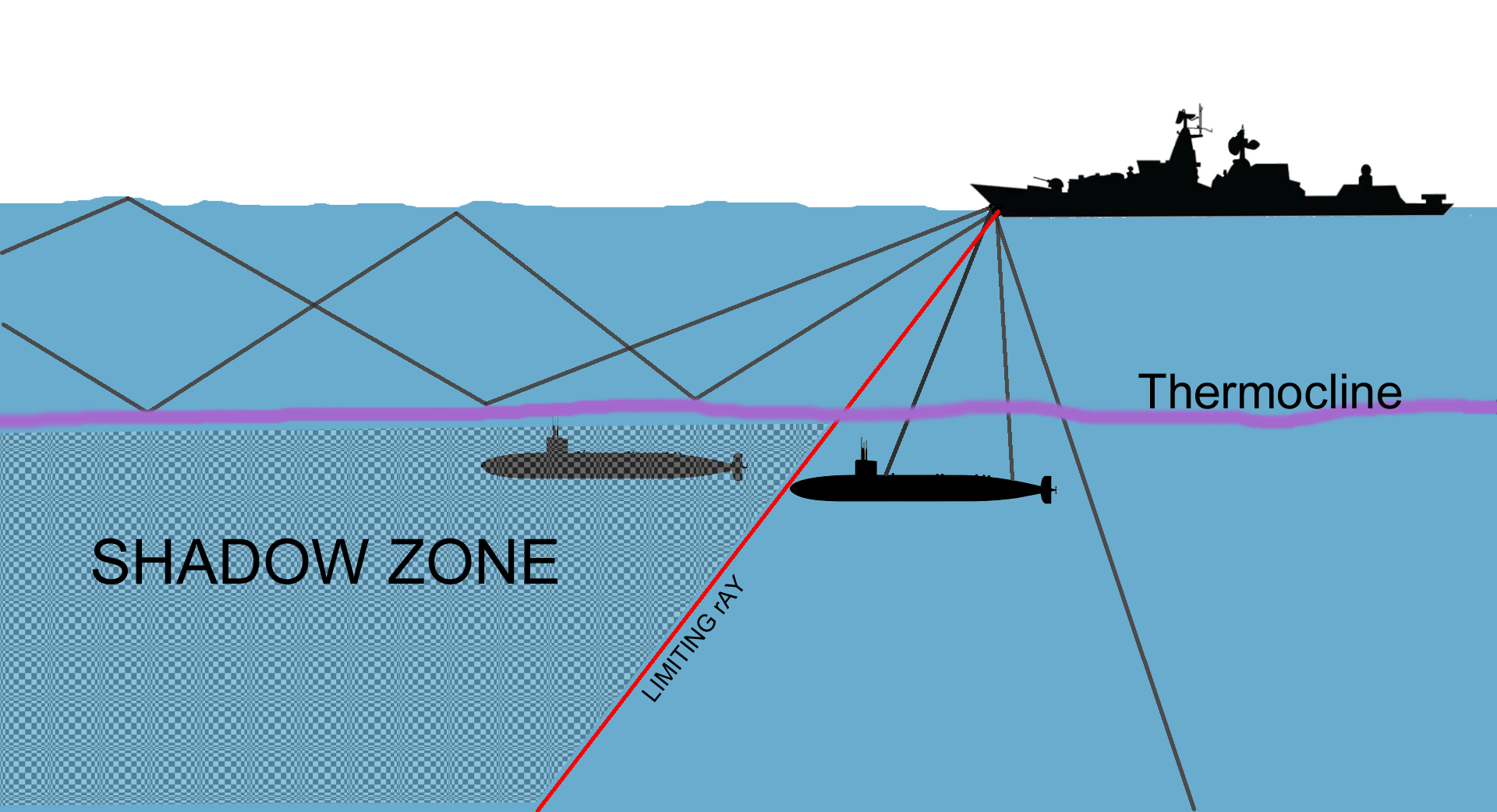
There is something called a limiting ray. Think of it as a mythical being like a unicorn. When sound reaches the layer, it can either pass through the layer or bounce off like a flat stone tossed across a smooth lake. It all depends on the angle. At angles greater than the limiting ray, sound will pass through the layer and into an area called the directly ensonified region. Remember, ensonify means “to fill with sound.” Submarines will want to avoid this area for obvious reasons.
At angles less than the limiting ray, sound will reflect off the layer back towards the surface, creating an area bounded by the layer and the limiting ray called the shadow zone. In the shadow zone, little sonar energy will penetrate, and submarines often use this area to hide and attempt to avoid detection. In my illustration above I would need to make it about four feet wide to be accurate, and the angle between the limiting ray and the layer would be only a few degrees.
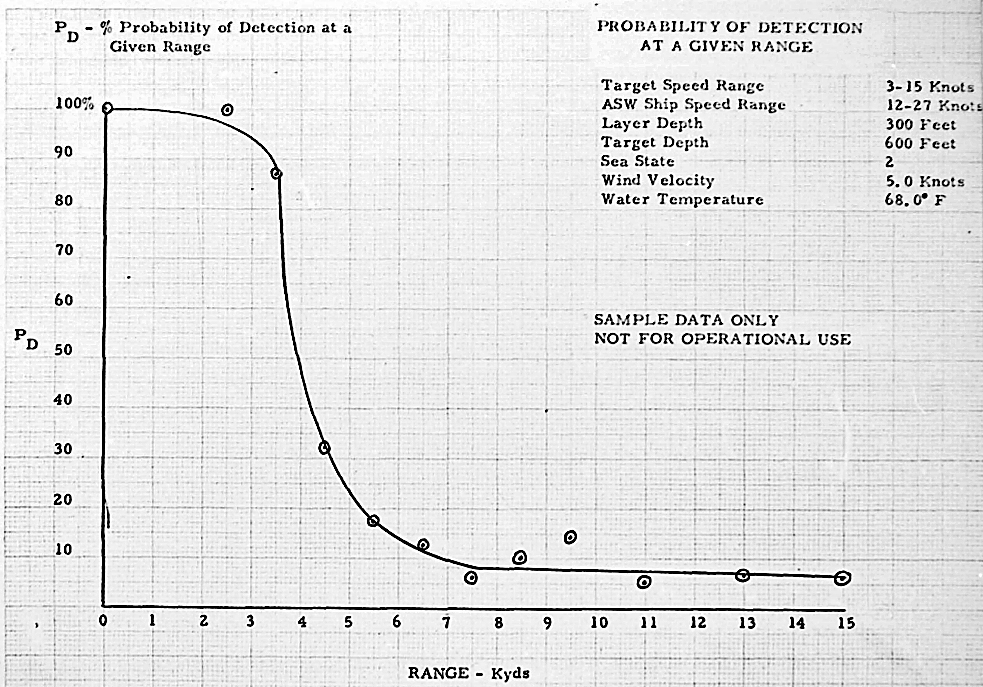
Theories are important, but actual test data is hard to beat. I was lucky to find a report of a real-world test that was conducted using the same AN/SQS-23 sonar that we had on our ship. It included the graph above.
During the test, the submarine’s depth was 600 feet and there was a layer at 300 feet. The theoretical data I found would suggest that the limiting ray was like a light switch—on one side nothing would penetrate the layer and on the other side sound would flood in as if there was no layer at all. The graph above suggests otherwise.
Looking at the graph It appears that the transition between the directly ensonified region and the shadow zone (the limiting ray) occurs about 3,000 yards from the ship. But instead of cutting off abruptly, the transition between the directly ensonified region closest to the ship, and the shadow zone, appears to be about one mile wide. In the directly ensonified region, the chance of detection is close to 100 percent. In the shadow zone it quickly drops to 10 percent or less. And in a space of just 500 yards, the chance of detection rose from 30 percent to 85 percent. At 20 knots we would cover that distance in 45 seconds. The graph also shows that some subs are occasionally detected in that shadow zone, so it is not a perfect hiding place for them.
I think this explains why we were almost on top of that sub before we detected its presence. As our limiting ray passed over them at 20 knots, the shadow zone that was hiding them was also moving with the ship and it was quickly replaced by the directly ensonified region. Suddenly we had a strong sonar contact. As for the sub, as the song goes, “If it weren’t for bad luck they wouldn’t have no luck at all.”
After all the Foxtrot crew had gone through to this point, they probably were not in the best of shape when we detected them. I think they knew we were headed directly towards them long before we arrived, and if they had a fully charged battery they could have sprinted away to safety at 15 knots submerged. But I believe they simply did not have the remaining battery capacity, so they ducked below the layer and hoped for the best.
Once detected, the Foxtrot captain had to be asking himself, “how much longer can I stay submerged before my air goes bad and my batteries go completely dead?” Meanwhile, back on the surface, we had organized ourselves and we were preparing for a lengthy engagement.
We had all the time in the world.
The sub did not.
Trapped
Our active bow-mounted sonar was our only tracking tool and it had limits. There is always a blind sector directly behind the ship called the baffles, where the hull of the ship and its turbulent wake block the sonar.
In those days, when two destroyers were prosecuting a sonar contact, it was critical that as one ship passed over the contact and then lost it in the baffles, the other ship was inbound and was able to regain contact quickly. Close coordination was critical, and a lot of things could go wrong when two warships were maneuvering at high speed near each other at night. We used two VHF voice nets to coordinate—PRITAC and SECTAC (Primary and Secondary Tactical.) Our two bridges would have been in constant contact on PRITAC and the two CICs would have been using SECTAC. These days every ship in the area would probably be on an encrypted mesh network with a satellite link back to headquarters.
During this delicate dance, the inbound ship was called “Brother” and the outbound ship, that had lost contact in its baffles, was called “Sister.” Brother is in charge. The two of us maneuvered in separate circles like two meshed gears—one in the clockwise direction and the other moving counter-clockwise. As the inbound ship (Brother) passed over the contact, its CIC would mark the datum over the SECTAC net. Sister would update their datum based on Brother’s exact radar position when datum was called out. Each would then adjust their track to pass over the new datum on the next pass. Communications might go something like this:
“Tidal Wave this is Tom Boy. I am Brother. You are Sister. Stand by for datum. Now, Now, NOW!… Contact lost in baffles. You are Brother. I am Sister…” And then, as we swung around to regain contact, the cycle would repeat with Tidal Wave as Brother.
A word of explanation is in order here. The datum is the last known location of the contact. It starts out as a point, but rapidly expands into a widening circular Area of Uncertainty, or AoU, based on the passage of time and the maximum speed of the sub. In our case, it probably took at least 30 seconds between the time one ship lost contact in its baffles, and reacquisition by the incoming ship.
At a maximum submerged speed of 15 knots, the sub could sprint about 265 yards in 30 seconds, which means that the datum would expand to an AoU of just over 500 yards in diameter, or one quarter of a mile before the next ship could attempt to reacquire the contact. Based on those 1979 test results, the sub might have had a reasonable chance of losing us if he could have made it three miles while we chased a decoy or were confused by a noise maker. I think he came close several times.
There were no datalinks, and all this action was coordinated over the two tactical voice nets and sound-powered phones talking between each CIC and their respective bridges. All documentation would have been by hand in paper logs and using a DRT (Dead Reckoning Tracer).
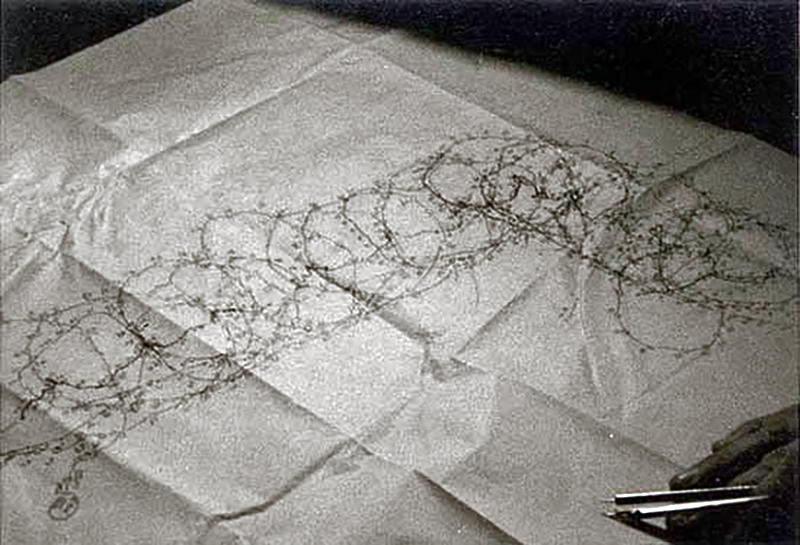
The DRT was an electromechanical system that projected colored spots up and onto a piece of thin tracing paper that was firmly taped to the glass top surface of the DRT cabinet. The projector ran on a pair of X/Y axis jackscrews. It was driven by the gyrocompass and the pitot log, so it followed the path of the ship across the ocean surface. The various colored dots were assigned to track the ship’s position, as well as inputs from radar and sonar data. You manually marked up the paper with a pencil by following the colored dots and annotating the trace with details such as the time or target ID.
When you look at the plot, all the circular paths are the two destroyers and the straighter line in the middle of it all is the sub. Notice how crazy things look in the upper right as the submarine became increasingly desperate.
Endgame
The fleeing Foxtrot was probably reaching the end of its endurance—the air was probably barely breathable, and the batteries were probably almost exhausted. Its crew tried everything it could to lose their two tormentors. They tried going deep, launching a decoy, then backing up their own wake and sprinting off in a new direction. Nothing they tried worked for long.
The next morning a Lockheed P-3 Orion ASW aircraft joined us from our naval base at Rota, Spain. The P-3 was a four-engine turboprop, and once on station it could shut down and feather one or two engines to reduce fuel consumption and increase endurance for up to 17 hours. It carried a host of offensive weapons in its bomb bay plus sonobuoys and a Magnetic Anomaly Detector (MAD) that looked like a big stinger that protruded from the tail. When using the MAD gear, it flew very low and when it detected an anomaly, it could be set to automatically drop a flare at night or a smoke pot during daylight hours. That was extremely helpful as the bridge crews could use the last flare or smoke pot as the datum and steer for it when making each new pass.

By the night of the 22nd, the sub’s crew must have been completely demoralized, exhausted and miserable. Our sonar pings and our high-speed propellers could all easily be heard throughout the sub, just as it is depicted in every World War II submarine movie. Meanwhile, we had perfected our routine and were prepared to continue indefinitely, or until the sub gave up and surfaced.
It was just a matter of time…
At this point we had been tracking the sub for 26 hours. Actually “tracking” does not describe what we had been doing to that submarine crew psychologically. Essentially, we had been conducting a continuous 26-hour depth charge attack and making it crystal clear that in a real engagement they would have all been dead after our first pass the previous evening.
Finally, at around 10:00 PM that night sonar heard hull popping sounds. The sub’s pressure hull was expanding as it rose towards the surface.
They were giving up.
We took up station 1,000 yards on either side of its position and waited…
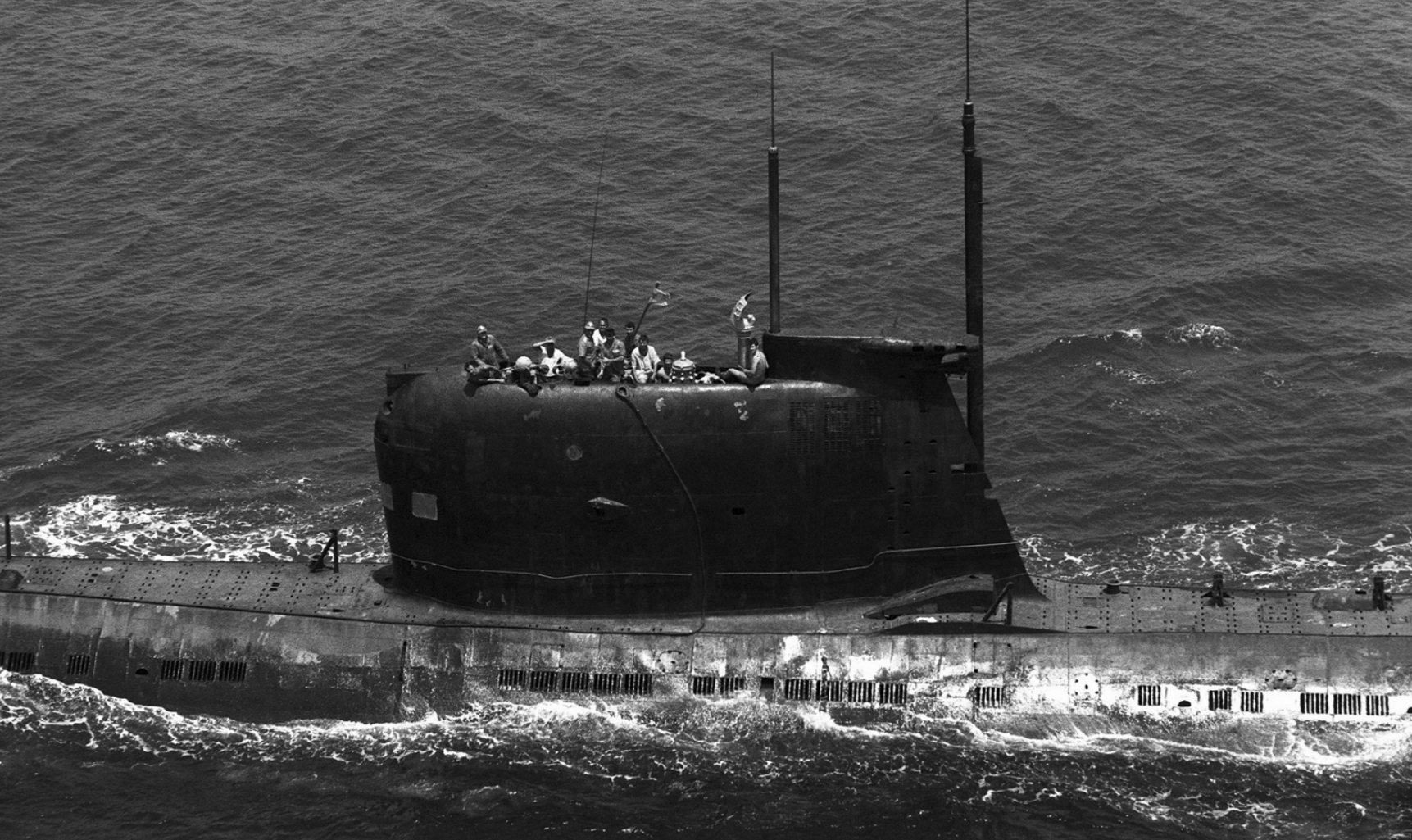
After the Foxtrot surfaced, the P-3 lit it up with a 70-million candlepower searchlight and made several photo passes. Their humiliation was complete.
At the time, small disposable film cameras were popular. They used a little flash bulb the size of a peanut. Several of my shipmates lined the deck and were flashing away at that small black sub half a mile away in the dark. Those little flash bulbs barely lit up the lifeline a few feet in front of them. That was a funny sight!
Eventually, we all began to lose interest. The P-3 was low on fuel and headed back to Rota, and we broke off contact and turned towards Gibraltar. Half an hour later, the P-3 returned unexpectedly and told us that they had been instructed to maintain contact until a fresh P-3 arrived to replace them. They asked us for a vector back to the sub. We had lost it on radar quite some time ago and we had no idea where it was.
If the sub took off at its maximum snorkeling speed, the area of uncertainty would have grown to about 15 miles in diameter.
Oh, well. I think we had made our point. As the song goes, “If you see me comin,’ better step aside. A lotta men didn’t, a lotta men died.”
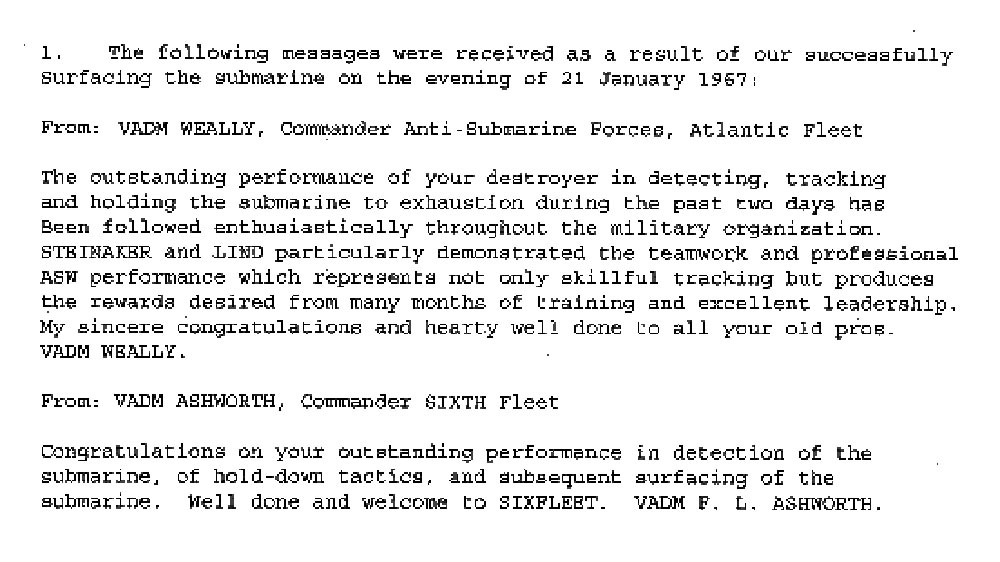
The following morning, we received congratulations from the Commander of the Sixth Fleet and the Commander of Anti-Submarine Forces in the Atlantic.
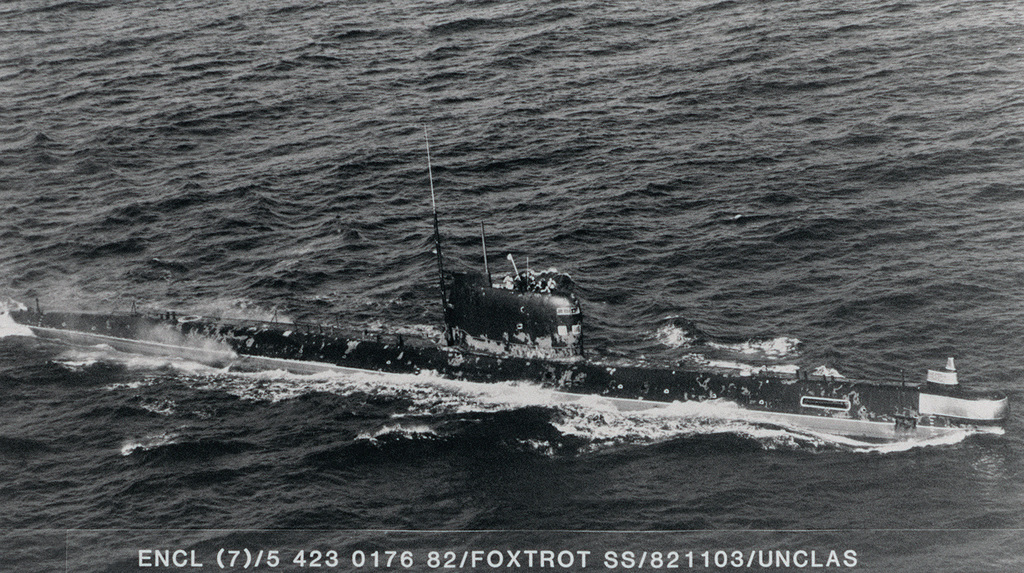
There were a total of 75 Foxtrot subs built between 1958 and 1979. It is hard to tell how many were active in January 1967, but Soviet deck logs show that at least 10 were in the Mediterranean that year. This is B-840, a Project 641 class sub—its deck log says it was forced to surface in the northeastern Atlantic in 1967. That fits, but the rest of the single-sentence log entry does not.


Was this our sub? We may never know for sure.
Contact the author: dd863juan@gmail.com
Contact the editor: Tyler@thedrive.com